2.8 Other Topics
The following section serves as a repository for mathematical derivations and identities which are used later in this book.
2.8.1 Trigonometric Approximations
Consider the Taylor series approximation for
centered at ,
provided in table 2.4 and rewritten in equation 2.292 for continuity.
| (2.292) |
We can rewrite equation 2.292 as shown in equations 2.293 and 2.294.
| (2.293) |
| (2.294) |
In equations 2.293 and 2.294, stands for error
truncation terms. For relatively small values ,
will be small. This is shown
in Table 2.5, where values of
and are compared for given
values of . Therefore, we
can simply replace in a
given equation with
since at small
values which
have low .
This is referred to as the small angle approximation.
A similar method can be used to show that for small values of
the small angle
approximation .
2.8.2 Coordinate axis rotation
In this book, many problems will utilize a coordinate axis or reference frame. At times, this
reference frame needs to be rotated. In this section, we will derive the new coordinates of a particle
after rotating it’s frame of
reference by distance from the
original coordinate system .
In doing this, please consider the Figure 2.14.
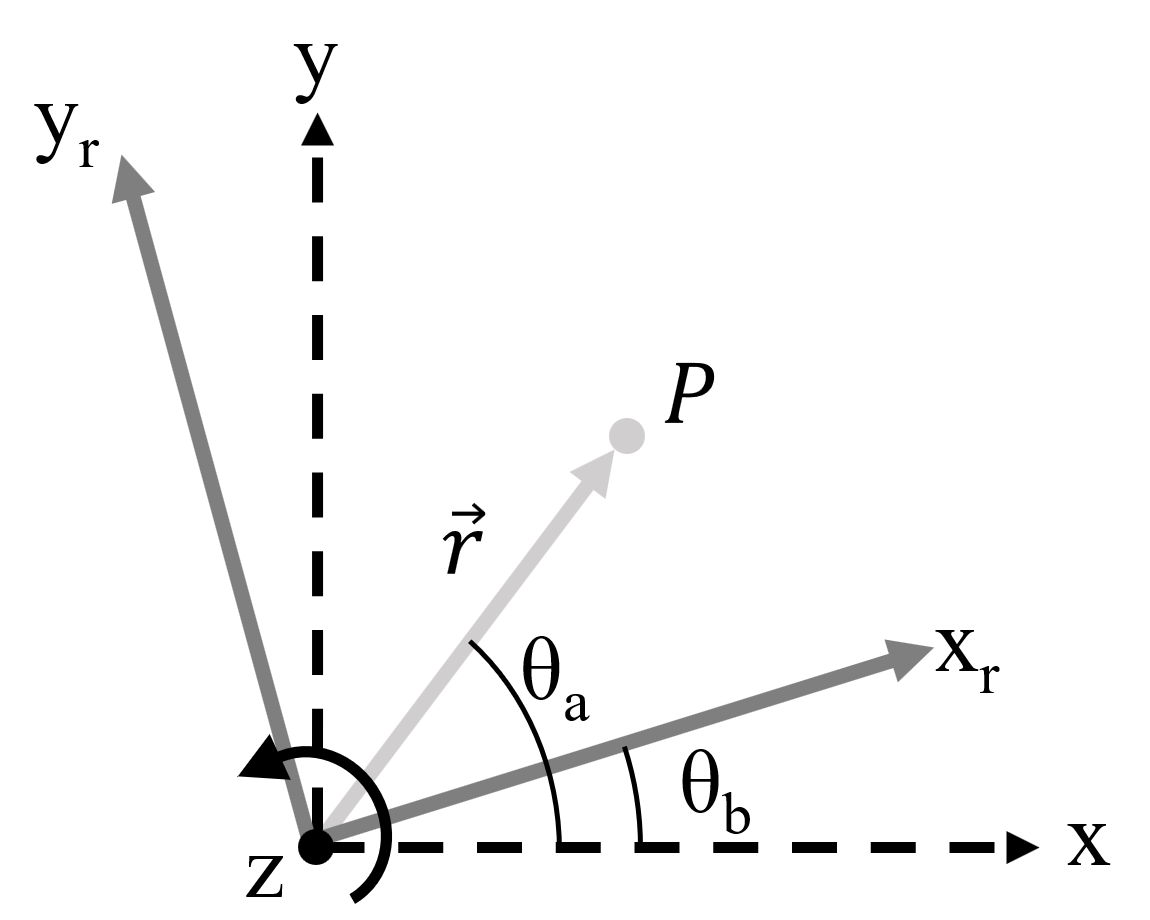
Let us analyze point indicated by
distance from the origin and angle
. By definition we know the following
is true for the coordinates of
in the
coordinate system:
We also know the following is true for the coordinates of
in the
coordinate system:
From trigonometry we can get the following identities:
Plugging 2.295 and 2.296 into 2.297 and 2.298, we get the following:
We can rewrite equations 2.299 and 2.300 in matrix form as shown in equation 2.301.
| (2.301) |
To go from to
, we
simply take the inverse of the matrix (section 2.6.0.0) to get equation 2.302.
| (2.302) |
For a three dimensional coordinate axis rotation, we must consider there are three possible ways the coordinate axis can be rotated; about
the x-axis (), about
the y-axis (), and
about the z-axis ().
Each of these rotations has a matrix associated with it, dubbed the ”rotation matrix”. The x-axis rotation matrix is provided
in equation 2.303.
| (2.303) |
The y-axis rotation matrix is provided in equation 2.304.
| (2.304) |
The z-axis rotation matrix is provided in equation 2.305.
| (2.305) |
In addition, the order in which we rotate matters; if we rotate our coordinate system about the x-axis, the y-axis will move.
Therefore, if our next rotation is about the ”new” y-axis, a different rotation will be achieved than if we rotate about the
original y-axis. In addition, it matters about what coordinate system we rotate. In an extrinsic rotation, each subsequent
rotation occurs about a fixed coordinate system. In an intrinsic, each subsequent rotation occurs about the new
coordinate system that results from the previous rotation. An extrinsic rotation that occurs about fixed axes
, then
, then
can be
conducted using equation 2.306.
| (2.306) |
An intrinsic rotation about axes ,
then the new , and
then the new
can be conducted using equation 2.307.
| (2.307) |
As shown in equation 2.307, an intrinsic rotation has the reverse order of the extrinsic rotation.
2.8.3 Imaginary Numbers
The imaginary number, symbolized by ,
is a term that is used to define the square root of -1 as shown in equation 2.308.
There is nothing imaginary about the imaginary number. In fact, the use of the word “imaginary” makes the imaginary
number seem far more mysterious than it is. In the following paragraphs it will be shown that applying the same
mathematical rules to imaginary numbers that we use for real numbers leads to very useful and interesting results.
Numbers that combine real and imaginary numbers are called complex numbers. There are two forms in which complex
numbers can be expressed; these are the polar form and Cartesian form (sometimes called rectangular form). A generalized
complex number in the polar form is shown in equation 2.309.
In equation 2.309,
is called the magnitude of the complex number and is also expressed as
. A
generalized complex number written in Cartesian form is shown in equation 2.310.
Polar form can be converted to Cartesian form by use of Euler’s identity (equation 2.248) as shown in equation 2.311.
| (2.311) |
The complex conjugate of a given complex number provided in Cartesian form is defined as a number which has the same real
part as the original number, but an opposite imaginary part. To find the magnitude of a complex number provided in
Cartesian form, we take the square root of the product of the number multiplied by it’s complex conjugate as shown in
equation 2.312.
To add two complex numbers and we simply individually add the real and imaginary components. To do this, we use the Cartesian form as shown in equation 2.313.
Similarly, to subtract two complex numbers
from we
subtract the real and imaginary parts individually. As with addition, to do this we use Cartesian form as shown in equation
2.314.
To multiply complex numbers in polar form, we can use rules of exponents and simply add the exponents as shown in
equation 2.315.
To multiply complex numbers in Cartesian form, we can foil as shown in equation 2.316.
To divide complex numbers in polar form, we can again use the rules of exponents as shown in equation 2.317.
To divide complex numbers in Cartesian form, we must first multiply the denominator (the term we are dividing by) by it’s
complex conjugate as shown in equation 2.318.
Simplifying equation 2.319, you may notice that the denominator becomes which is a real number. Therefore, our simplified quotient is shown in equation 2.319
Complex functions
A complex function is a function which acts on a complex number. This means that a complex number is taken in by the
function and based on this input, a complex number is output by the function. Therefore, if our input is
then our output
will be
as shown in equation 2.320.
In equation 2.320, is a real valued
function of which constitutes the
real part of the function output, and
is another real valued function of
which constitutes the imaginary part of the function output.
An example of a complex function is provided in equation 2.321.
Plugging in the Cartesian form of a complex number (equation 2.310)for
, we get
equation 2.322.
From equation 2.322, we can clearly see that ,
and .
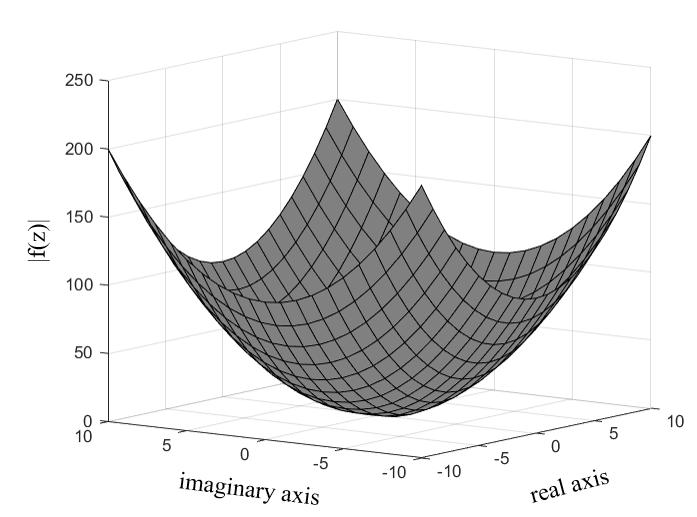
A fundamental constraint with the graphing a complex functions is that we have two inputs
and
along with
two outputs
and ,
making this a four dimensional dataset which cannot be easily shown in three dimensions. Therefore, the magnitude
is typically plotted
as a function of
and .
Such a plot is for the function in equation 2.322 is shown in Figure 2.15.
Why complex numbers are commonly used to model waves
Waves are fundamentally sinusoidal functions (either
or ). In
many physics/engineering applications, we are interested in adding, subtracting, multiplying, and dividing wave
functions (i.e. sinusoidal functions). From Euler’s identity (equation 2.248), we know that a complex number is
sinusoidal in nature making it eligible for modeling waves. In addition, operating on complex numbers is relatively
simple due to the availability of both the Cartesian and polar forms; adding/subtracting (equations 2.313 and
2.314) is easily done in Cartesian form, while multiplying/dividing (equations 2.315 and 2.317) is easily done
in polar form. This simplicity of operations is why complex numbers are commonly used to model waves.