2.7 Other coordinate systems
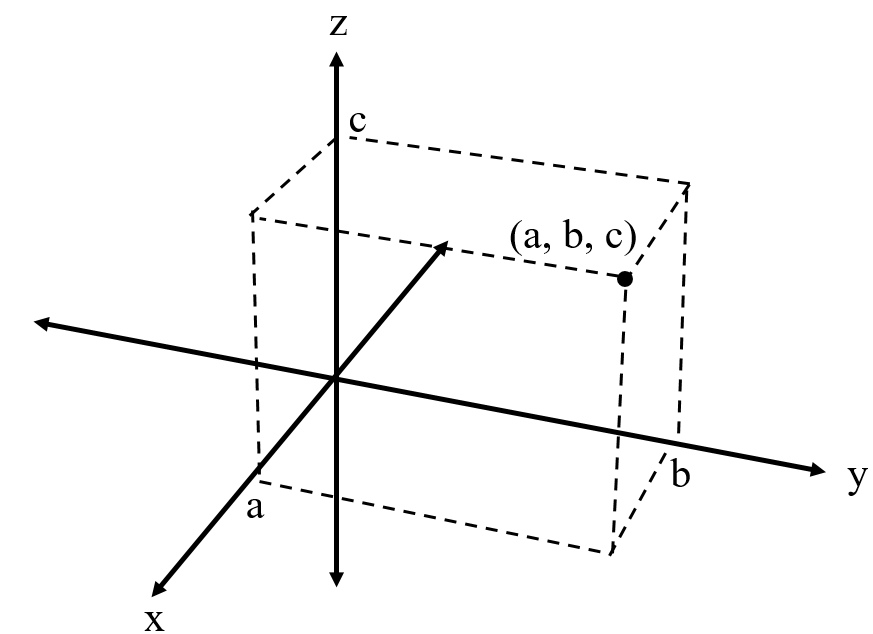
Within this book, we have operated and will continue to operate mostly within the Cartesian
coordinate system. This coordinate system uses the distance from the origin along the
,
, and
(in 3D)
axes to specify the location of a point in space. This is shown in Figure 2.11.
In this section, we will go over two other commonly used coordinate systems; cylindrical and spherical.
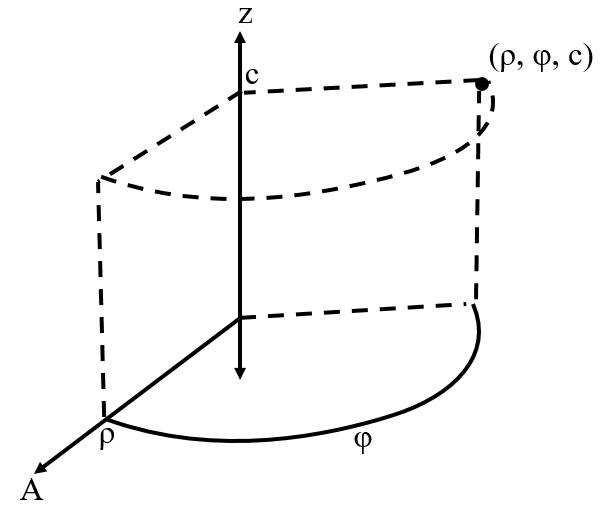
2.7.1 Cylindrical Coordinate System
The cylindrical coordinate system is also sometimes referred to as the polar coordinate system. This coordinate system keeps the
coordinate from the Cartesian
coordinate system. However, the
and
coordinates from the Cartesian coordinate system are replaced with the axial distance
() and azimuth
() coordinates. The
coordinate is the normal
distance from the axis to
the point of interest. The
coordinate is the angle between a axis extending from the origin and normal to the
axis (called an azimuth reference, symbolized by A) and a line extending from the origin onto a
projection of the point of interest on the plane which includes the origin and is normal to the
axis. A
visualization of the polar coordinate system is provided in Figure 2.12.
Using geometry, we can derive the following equations to transform any polar coordinate to Cartesian.
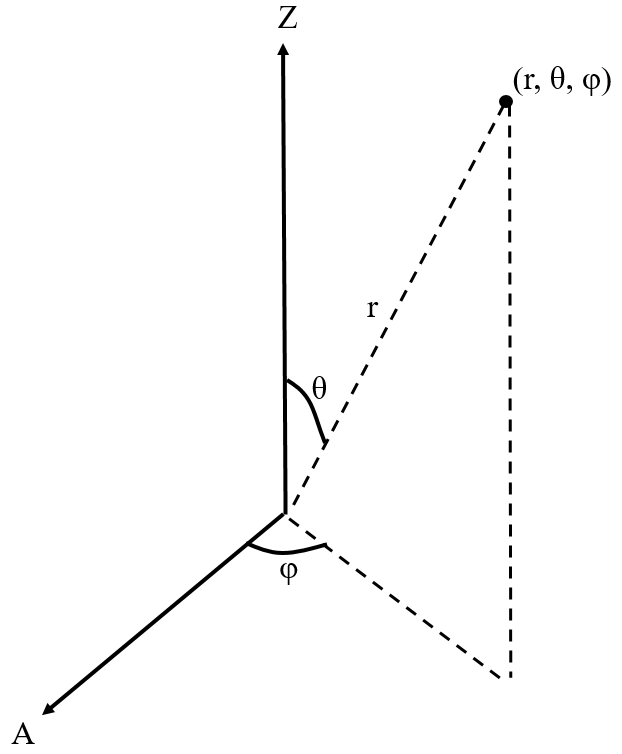
2.7.2 Spherical Coordinate System
The spherical coordinate system defines a point in space based on the radius
(), the inclination
(), and the
azimuth (). The
coordinate is the distance from the
origin to the point of interest. The ()
coordinate is the angle between a axis extending from the origin (called an zenith reference,
symbolized by Z) and the line connecting the origin and the point of interest. The
coordinate is the angle between a axis extending from the origin and normal to the Z axis (called an azimuth reference,
symbolized by A) and a line extending from the origin onto a projection of the point of interest on the plane which includes
the origin and is normal to the Z axis. A visualization of the spherical coordinate system is provided in Figure
2.13.
Using geometry, we can derive the following equations to transform any spherical coordinate to Cartesian.