2.1 Calculus Fundamentals
Calculus is defined as the branch of mathematics that utilizes infinitesimally small quantities to study continuous change.
The two main topics within calculus are the derivative and the integral.
2.1.1 The Derivative
In order to understand the derivative, we will start with a two variables
(). These
variables are related to each other by the function presented in equation 2.1.
Our goal is to find how much
varies per increment of . This
”quantity of change per unit ”
is symbolized by the variable .
In order to do this, we can start out with equation 2.2.
Equation 2.2 will tell us how much
changes from to
. However, we are interested in the
amount is changed instantaneously.
Therefore, we can say that
where is
an infinitesimally small quantity. Plugging this into equation 2.2 we get equation 2.3.
Simplifying the denominator of equation 2.3 and plugging in equation 2.1 we get equation 2.4.
Please note that since we are now dealing with one value of , we replaced with . The above equation can be used to find the instantaneous change in per infinitesimally small interval for any value . Typically, we replace with the following notation.
The symbolizes ”The change in per a infinitesimally small interval ”.
Short Example
Let us start with the function shown in equation 2.6.
For the purpose of this example, let us assume that
is the position of a particle at any time . We
want to find the instantaneous change in
per interval .
You may notice that this is position divided by time ... we are calculating speed. Plugging equation 2.6 into equation 2.5 we
get equation 2.7.
Solving the limit in equation 2.7, we get equation 2.8.
The Chain Rule
Finding the limit of complicated functions using equation 2.5 is very difficult. Therefore, calculus students typically memorize
series of rules which correspond to the derivatives of functions. One of the most fundamental derivation rules is the chain
rule. The chain rule deals with derivatives of functions within functions. Consider the function provided in equation
2.9.
To simply equation 2.9, we can state . The chain rule then states can be found using equation 2.10.
Essentially, you take the derivative of the outside function first, treating the inside function as a variable, and then take the
derivative of the inside function.
The Product Rule
Consider a function which consists of
the product of two separate functions
and , as
shown in equation 2.11.
The product rule states that the derivative of
can be calculated using equation 2.12.
The product rule can be derived by use of equation 2.5. However, calculus proofs are outside of the scope of this book.
The Quotient Rule
Consider a function which consists of
the quotient of two separate functions
and , as
shown in equation 2.13.
The quotient rule states that the derivative of
is as shown in equation 2.14.
The quotient rule can be derived by use of equation 2.5. However, calculus proofs are outside of the scope of this book.
2.1.2 The Partial Derivative
The partial derivative is used when we differentiate a function with more than two variables. An example of such a function is shown in equation 2.15.
Now, we need to make a decision. Are we interested in finding out how much
changes per increment of
? Or are we interested in
finding out how much
changes per increment of ?
Lets go with the change of
with respect to .
This change can be expressed using equation 2.16.
Following the example from section 2.1.1, equation 2.16 will tell us how much
changes
from to
. However, we are interested in the
amount is changed instantaneously.
Therefore, we can say that
where is
an infinitesimally small quantity. Plugging this into equation 2.16 we get equation 2.17.
Please note that in equation 2.17, the denominator was simplified and equation 2.15 was plugged in. The
notation mimics the
notation from equation
2.5. However, the fancy
emphasizes that this is a partial derivative. Partial referrers to the fact that we are finding the change in
with respect to one out of two possible variables. We can repeat the proceeding process to find
.
Short Example
Let us start with the function in equation 2.18.
We are interested in finding .
In order to do this, we use equation 2.17 accordingly.
Solving the limit, we are left with equation 2.19.
In order to provide a visualization, a graph of the function in equation 2.18 with the
plane overlaid is provided in Figure 2.1. The derivative of the grey line is
at
.
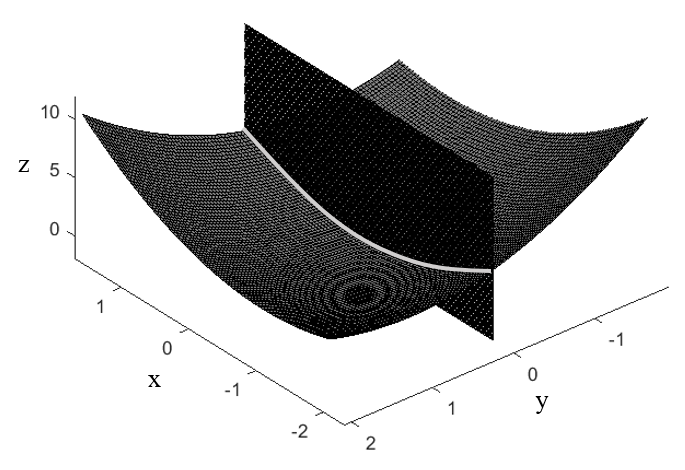
The partial derivative simply constrains the original function
to a two
dimensional plane and then finds the derivative (section 2.1.1) on that plane.
2.1.3 The Integral
In the derivative sections, we reviewed a method for finding the change in a variable (in section 2.1.1 this was
) per an interval of another variable
(in section 2.1.1 this was ).
This process can also be thought of as a type of instantaneous division. We divide the change in
by the change
in , given that
the change in
is infinitesimally small. The integral can be thought of as the opposite of the derivative; instead of dealing with instantaneous
division, it deals with instantaneous multiplication.
To understand the integral, let us begin with the function shown in equation 2.20.
Our goal is to multiply
by some interval .
is equal to
. The result of the multiplication
will be represented by .
Since varies as a
function of ,
we need to use the the series shown in equation 2.21 for such a multiplication.
Essentially, we are freezing the continuous
function at points ,
,
(and so forth) and then multiplying
this function by an incremental , which
is the distance between each frozen
value. Naturally, must
equal the total interval
().
We also set up the above sequence so that each incremental
value is of the same
quantity. Therefore, .
The stands
for
incremental and will be used from now on. If we want to find the value of
we can
use equation 2.22.
In equation 2.22 is the total amount
of terms we use to calculate .
Plugging in equation 2.22 into equation 2.21 we get equation 2.23.
| (2.23) |
We can rewrite equation 2.23 as a series as shown in equation 2.24.
| (2.24) |
How, here is the fun part. The more
terms we have, the more ”accurate” our result will become because we will be freezing
at more locations. Therefore,
ideally, . We can rewrite equation
2.24 to include a limit for
approaching infinity. This is shown in equation 2.25.
| (2.25) |
In equation 2.25, was
replaced by the .
The is called the
integral sign and represents a big elongated S, which stands for sum. The integral is, as shown in the above sequences, a repeated sum. As
stated previously,
and are the lower
and upper bounds of .
represents
which is multiplied and added an infinite amount of times, with the goal of multiplying
by
.
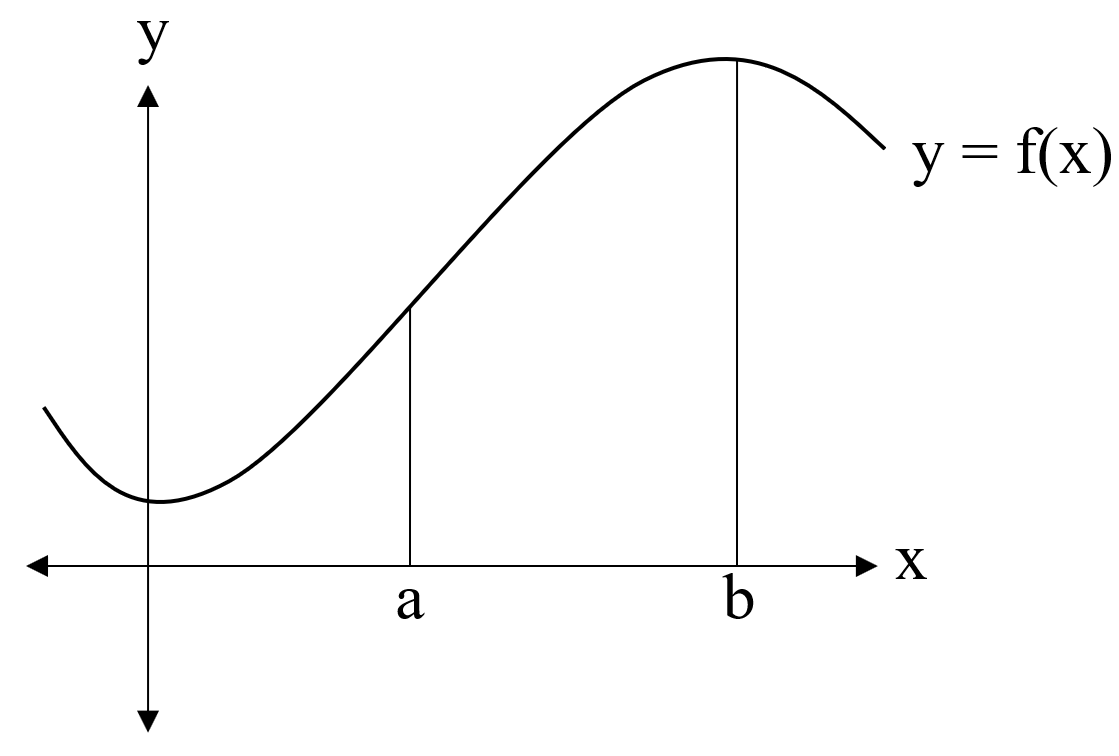
The integral can be easily visualized as the area under a curve, as shown in Figure 2.2.
A short example
Let us begin with the function in equation 2.26.
| (2.26) |
We are interested in integrating (multiplying) this term by the interval
. For the purpose of this
example, let us assume that
is velocity and
is time. You may notice that we are multiplying velocity by an interval of time
()... we are calculating position
traveled during the time period .
Plugging in equation 2.26 to equation 2.25 we get equation 2.27.
| (2.27) |
Simplifying equation 2.27, we get equation 2.28.
| (2.28) |
Part of this sequence actually has a known solution shown in equation 2.29.
| (2.29) |
There are numerous visual and traditional mathematical proofs for the series sum shown in equation 2.29. These will not be covered in this
book. Since we know that
is a constant, we can plug in equation 2.29 into equation 2.28 to get equation 2.30.
| (2.30) |
Evaluating the limit in equation 2.30, we get equation 2.31.
| (2.31) |
You may notice that this gave us the exact same output as equation 2.6. We essentially just undid what was done in
the example in section 2.1.1.0. This solidifies the concept that the integral is the opposite of a derivative.
2.1.4 Double (and beyond) Integrals
In section 2.1.3 we reviewed how to multiply by an interval if varies as a function of . In this section, we expand the definition of the integral to make it compatible with multiple variables. In order to do this, let us begin with equation 2.32.
Our goal is to multiply
by some interval
and .
is equal
to .
is equal
to .
Plugging this into equation 2.25 we get equation 2.33.
| (2.33) |
As with the single integral, we are finding
at each incremental location and
multiplying this value by the interval
and .
All these “multiplications” are then added together. In equation 2.33, we first iterate through all
intervals with
fixed at 1, and then
move on to and so forth.
This makes the inner
integration variable and
the outer integration variable. However, since this is all multiplication and addition it does not matter which order we use. The
solution to is
the same as .
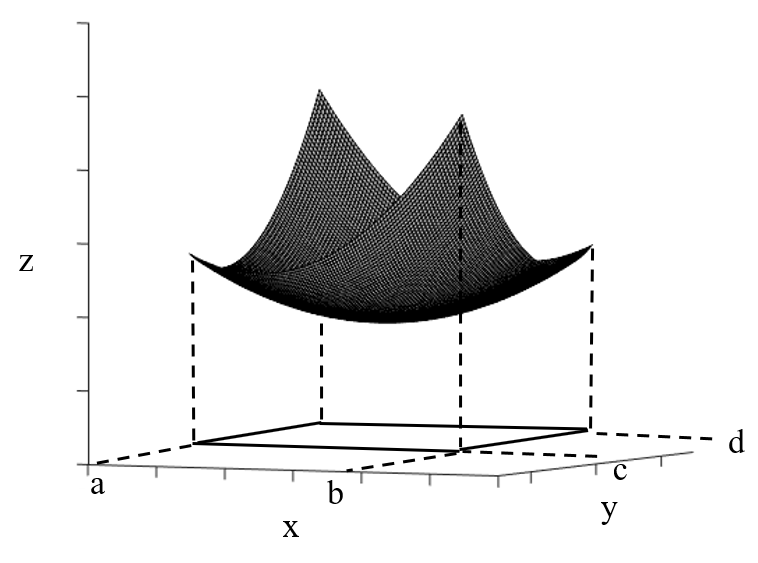
The double integral can be easily visualized as the volume under a surface, as shown in Figure 2.3.
We can follow a similar pattern for variables that are a function of three (or more) variables. In this case we would get a
triple (or more) integral.
A short example
Let us begin with the function provided in equation 2.34.
| (2.34) |
We are interested in integrating (multiplying) this term by the interval
and
.
Plugging the equation 2.34 into equation 2.33 we get equation 2.35.
| (2.35) |
As before, part of this sequence actually has a known solution shown in equation 2.36.
| (2.36) |
Plugging equation 2.36 into equation 2.35 and simplifying we get equation 2.37.
| (2.37) |
Now we can plug in equation 2.36 again; given that we replace
with
. Doing
this we, are left with the limit provided in equation 2.38.
| (2.38) |
Evaluating the limit in equation 2.38, we obtain the answer as shown in equation 2.39.
| (2.39) |
2.1.5 Methods of Integration
The integral is defined in equation 2.25. Considering we are dealing with an sum with a number
of terms which approach infinity, finding a solution for any function can be very hard. In the
short examples provided for both the integral and double integral we used the convenient identity
.
However, not every function has a closed form equation for a given sum. In practice, integrals are usually solved with the help
of known base function integrals. Algebraic manipulations are used to simplify an original function into one in the form of
such base functions, allowing for easier integration. In this section, three common algebraic manipulations used to simplify
integrals are provided. This is not a comprehensive list; there are other methods such as trig substitution which
are also used to simplify integrals. However, the methods included in this section are deemed most relevant.
U Substitution
U substitution is a process of reversing the chain rule (the chain rule is introduced in section 2.1.1.0). Consider the integral
shown in equation 2.40.
| (2.40) |
By using the substitution
we can rewrite the equation 2.40 as shown in equation 2.41.
| (2.41) |
The idea here is equation 2.41 is simpler to look at and therefore easier for to integrate.
Short Example
Consider the function provided in equation 2.42.
| (2.42) |
Setting ,
we can rewrite the equation 2.42 as shown in equation 2.43.
| (2.43) |
It is given that .
Therefore, plugging
back in, our final answer is obtained as shown in equation 2.44.
| (2.44) |
Integration by Parts
Integration by Parts is a way of reducing the power of a term within a two term integral. The integration by parts identity is
provided in equation 2.45.
| (2.45) |
Short Example
Consider the function provided in equation 2.46.
| (2.46) |
Let us define the above equation in terms of equation 2.45.
, and
. Therefore,
.
Plugging this all into equation 2.45 we are left with equation 2.47.
| (2.47) |
The integral in equation 2.47 simplifies so nicely because .
Partial Fraction Decomposition
From algebra, we know the identity provided in equation 2.48 is true.
| (2.48) |
Equation 2.48,
and are both
known constants. The partial fraction decomposition technique is a method of doing the opposite of this operation. Essentially,
given we
want to get .
The reason we want to decompose polynomial fractions in this way is because it is easier to integrate
than it is
to integrate .
The first step in a fraction decomposition is to write an equation in the general format provided in equation 2.49.
| (2.49) |
In equation 2.49,
and
are both unknown constants. Multiplying both sides of equation 2.49 by
we get
equation 2.50.
| (2.50) |
From here it is quite obvious that
and .
In the case of more complicated algebra, a system of equations can be used to find
and
.
There are some specific rules regarding situations where the denominator of the original equation is at a given power (for example
) or when the power of the denominator
is greater than 1 (for example ).
The goal here is to provide a method overview and therefore we will not go over how to do partial fraction decomposition in
these specific cases.
Short Example
Suppose we tasked with solving the integral in equation 2.51.
| (2.51) |
Factoring the denominator of equation 2.51 and using equation 2.49 we get the equation 2.52.
| (2.52) |
Multiplying equation 2.52 by
we get equation 2.53.
| (2.53) |
Now, we can plug in 2 different values for .
It doesn’t matter which values. We will be then left with 2 equations and two unknowns. Solving this system of equations, we
get and
. We can
plug these values into equation 2.52, and then plug this new identity into the original integral. Doing this, we are left with
equation 2.54.
| (2.54) |
The integral in equation 2.54 is easier to integrate than the integral in equation 2.51, although they are equivalent.